Introduction
Order of system is highest power of ‘s’ in the denominator of a closed loop transfer function. First-order systems are represented by a single pole in the s-plane, and second-order systems by a pair of poles. There may not be zeros in the transfer function, depending on whether there are derivative terms on the right-hand side of the differential equation. From the differential equation, the system function can be written directly. If we assume that the systems are causal, so that the impulse response is right-sided, then the ROC of the system function is implicitly specified to be to the right of the rightmost pole in the s-plane.
Theory
To analyse a first order system, consider a simple RC network
Find Vout i.e response if it is excited by unit step input:
Now first calculate transfer function
Substituting,

Taking Laplace inverse
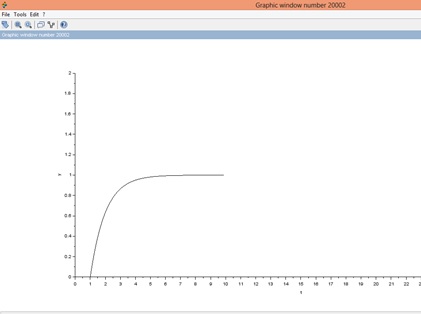
Now Transient term is totally dependent on the values of R & C and its rate of exponential decay will get controlled by -1/RC which is pole of the system. The values of R & C will not affect the steady state part.
The response is shown in the following fig.
In general,the transient response of first order system depends on poles of closed
loop transfer function. Also,it depends on location of poles of closed loop transfer
function. It is independent of the magnitude of input applied. Any change in the magnitude
of input will not have any effect on the transient response of the system.
Objective
To find the response of first order system by using Xcos simulator when unit step input is applied to it.
Experiment
Click on Sci Lab Simulator for 64 bit windows: Download Simulator and download it.
Click on Sci Lab Simulator for 32 bit windows: Download Simulator and download it.
Launch open source scilab software .
Go to Xcos simulator. XcosCan be launched from the toolbar, via the icon 
Manual
Numerical simulation is now a days essential in system design process. Complex phenomena simulation (physical, mechanical, electronics, etc.) allows the study of their behaviour and results without having to conduct costly real experiments. Widely used in the world of industry, the future generation of engineers and scientists are trained since secondary school to the concepts of modelling and simulation.
Xcos is Scilab tool dedicated to the modelling and simulation of hybrid dynamic systems including both continuous and discrete models. It also allows simulating systems governed by explicit equations (causal simulation) and implicit equations (a causal simulation). Xcos includes a graphical editor which allows to easily represent models as block diagrams by connecting the blocks to each other. Each block represents a predefined basic function or a user defined one.
Xcos opens by default with windows:
- Apalette browser which provides a set of predefined blocks.
- An editing window which is the working space to design diagrams.
To design a diagram, just select blocks in the palette browser and position
them in the editing window (click, drag and drop). Blocks are then connected to each
other using their different ports (input, output, event) in order to simulate the created model.
Procedure
- Launch Xcos on Scilab. Xcos can be launched from the toolbar, via the icon .
- Xcos opens by default with the palette browser & an editing window.
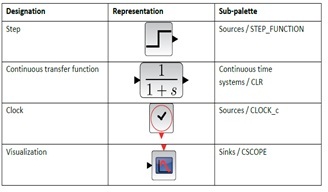
- In the palette window, we are going to use the following blocks:
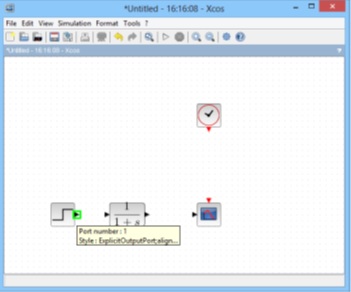
- Arrange the blocks in the editing window:
- Connect the I/P & O/P ports to each other.
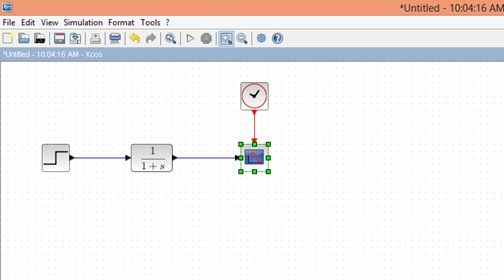
- Release to complete the links.
- Simulation is launched by clicking on the
 .
.
Quizzes
Q1. The first order system which is well designed has a
(a) Small bandwidth
(b) Negative time constant
(c) Large negative transfer function pole
(d) None of the above
Answer: c
Q2. By which of the following,the system response of first order system can be tested?
(a) Ramp input
(b) Sinusoidal
(c) Impulse
(d) Exponentially decaying
Answer: c
Q3. In a system zero initial condition means:
(a) The system is at rest and no energy is stored in any of its components
(b) The system is working with zero stored energy
(c) The system is working with zero reference signal
Answer: a
Q4. The type zero system has _____ at origin
(a) no pole
(b) net pole
(c) one pole
(d) two poles
Answer: a
Q5. Transient response of a system depends upon
a) Location of closed loop poles in s-plane
b) Order of system
c) Both a) & b)
d) None of the above
Answer: c